
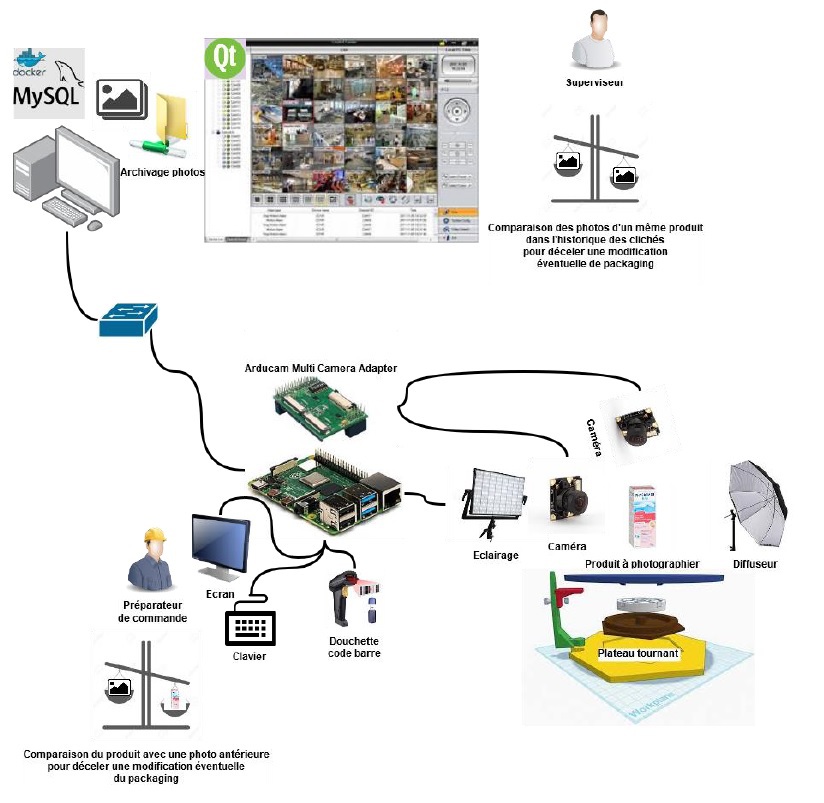
Projet 5 : CrossDock SPR Studio Photo Reconnaissance
Texte légal : Dossier de présentation du projet

Texte légal : Interactions IR ↔ EC
Interactions IR ↔ EC
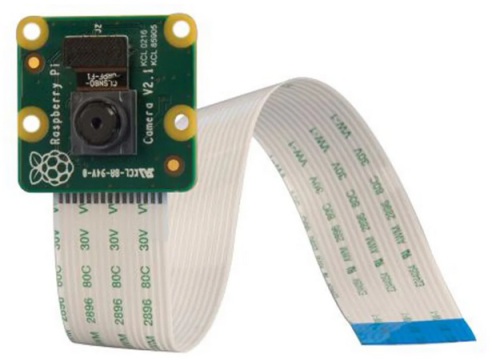
Complément : Raspberry Pi 3

 |
|
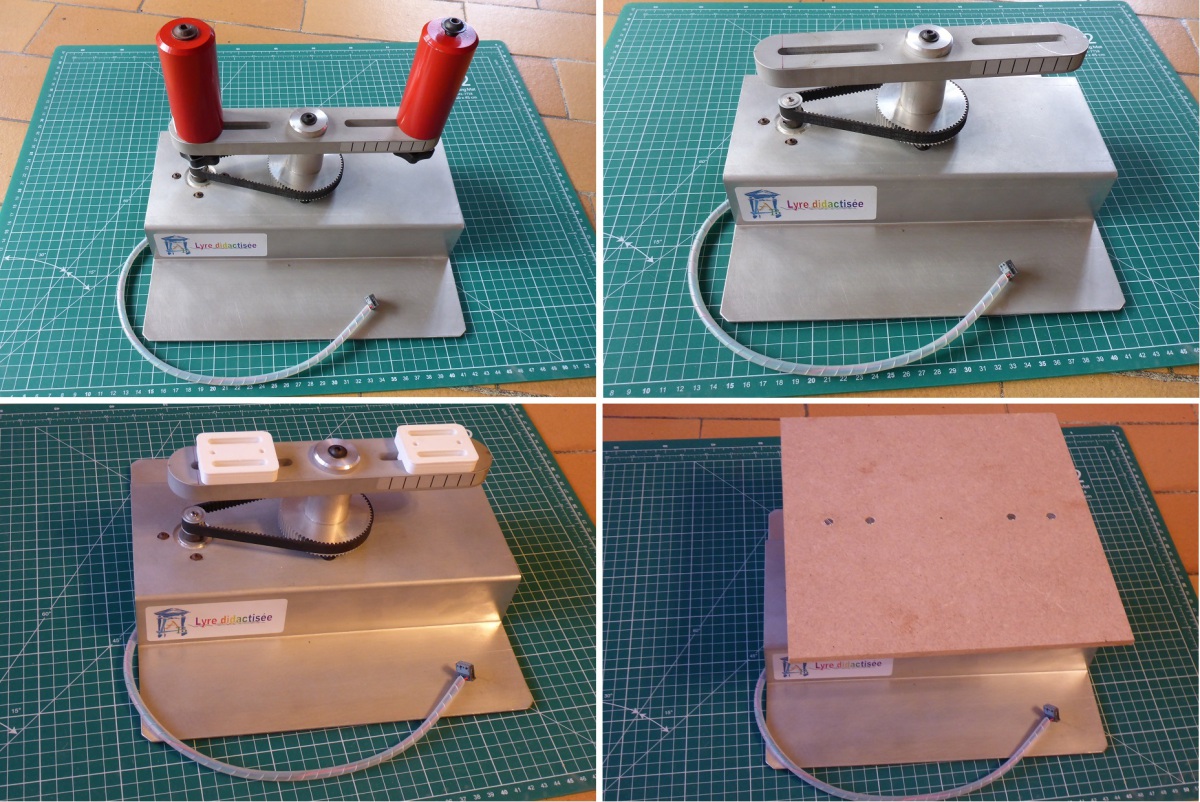
Complément : Plateau rotatif
Complément : Moteur pas à pas
Moteur pas à pas
Bipolaire 200 pas 12V | 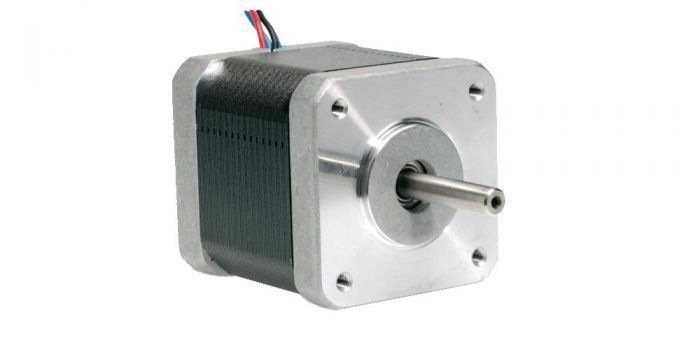 |
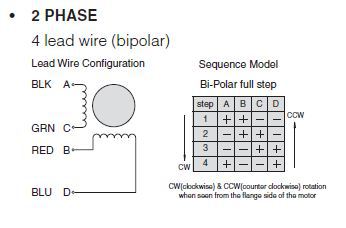
Câble moteur pas à pas XH2.54 : |  |
Embase Box-Type JST XH : S4B-XH-A(LF)(SN) droit : | 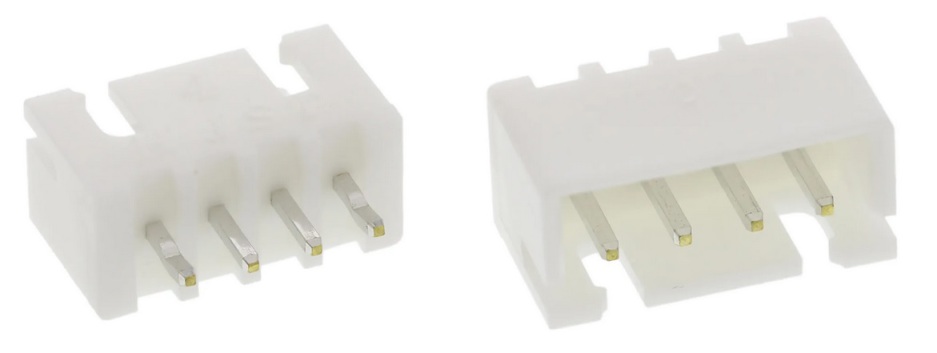 |
Embase Box-Type JST XH : B4B-XH-A(LF)(SN) angle droit : | 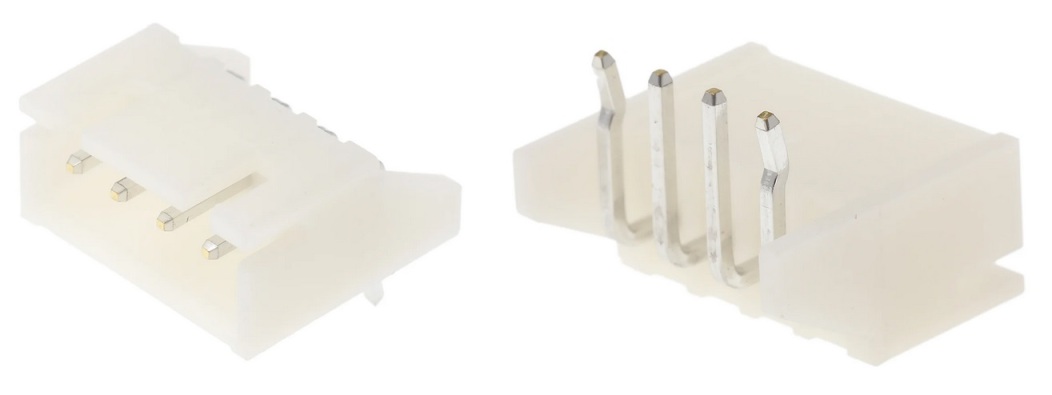 |
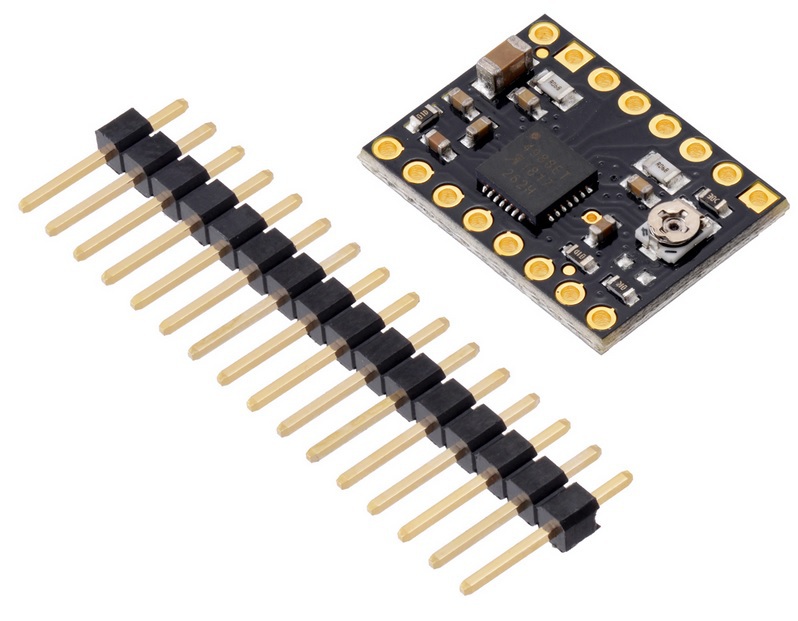
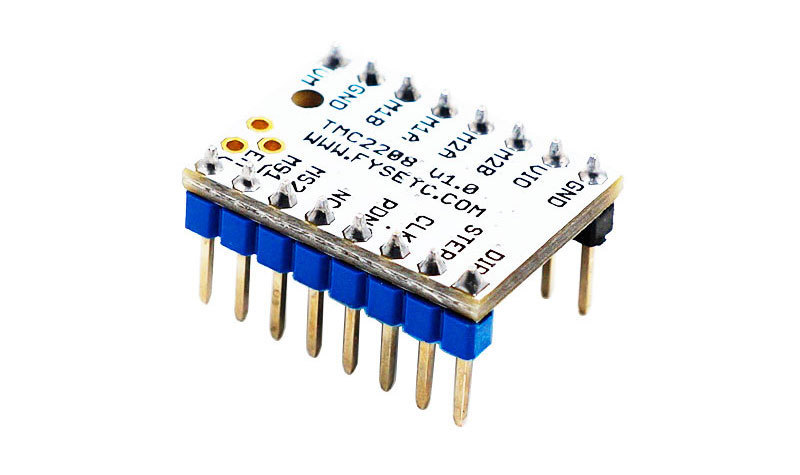
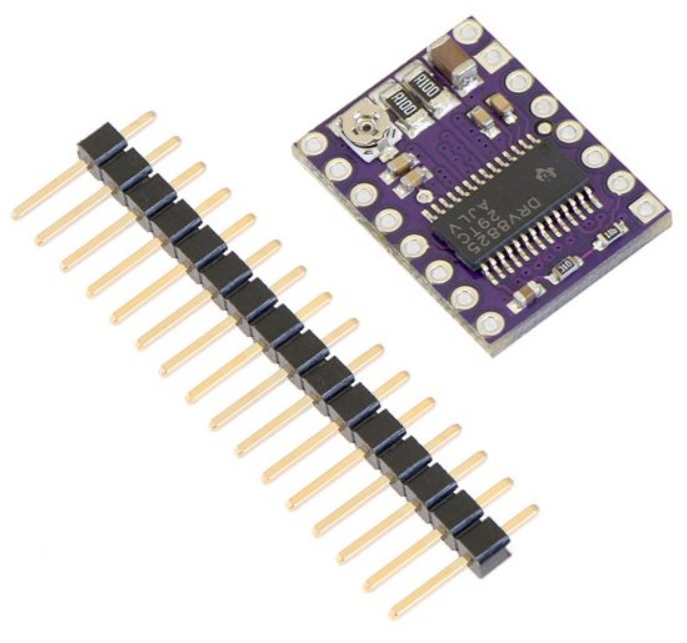
Complément : Drivers moteur pas à pas
Drivers pour moteurs pas à pas
 |
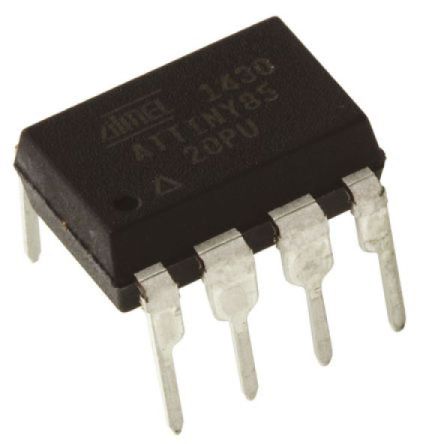

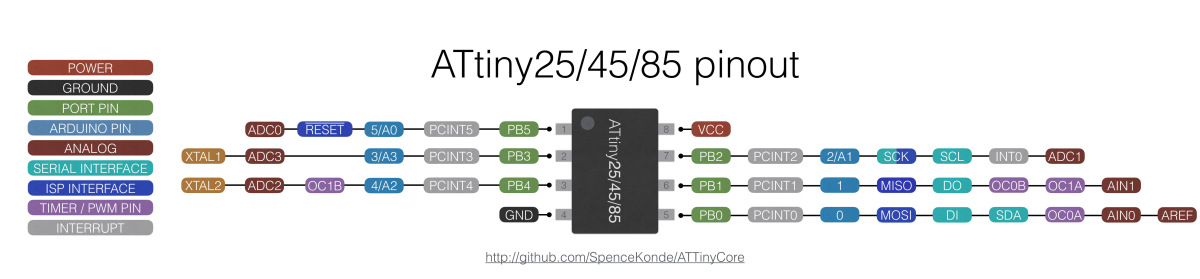
 | Programmateur d'ATtiny 85 : |
 |

Breakout TB6612FNG pour les essais | 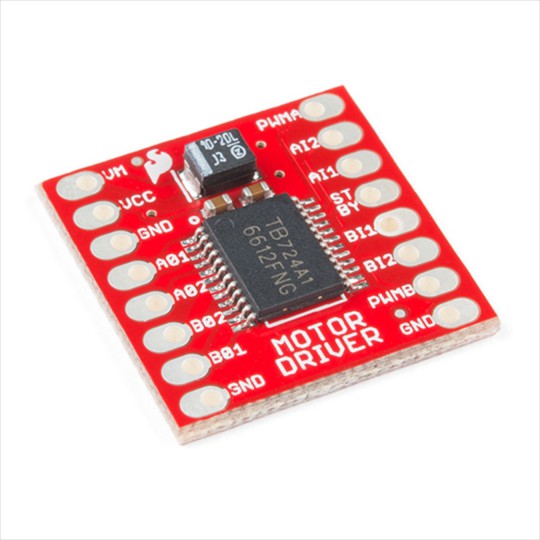 |
Complément : Level-Shifter

Transistor pour le prototypage rapide : |  |
Transistor pour le circuit imprimé : |  |
Complément : ICR : Indice de rendu des couleurs
ICR : Indice de rendu des couleurs = CRI : Color Rendering Index
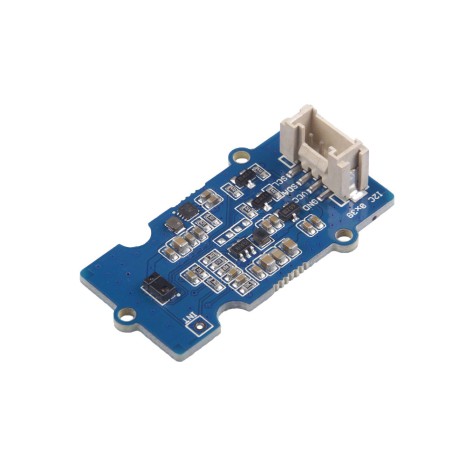
Complément : Capteur de luminosité
Capteur de luminosité
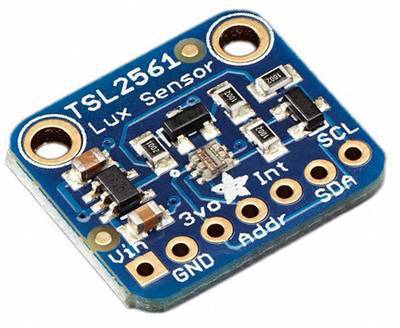
TMG39933-M : |  |
Complément :

Complément : Commande de l'éclairage par DMX512


Complément : Projecteur DMX Lumière Cold White (blanc froid)
 |
Radiateur avec ventilateur 12V pour LED 10W : | 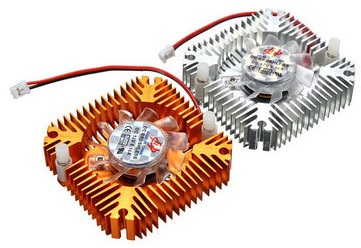 |
Arduino Nano : |  |

Problème de programmation de l'Arduino Nano à partir de l'IDE Arduino :
la vitesse de programmation (Overriding Baud Rate) doit être de 115200.
cette vitesse de programmation est configurée dans le fichier board.txt qui est installé ici C:\Program Files (x86)\Arduino\hardware\arduino\avr
ouvrir ce fichier en mode administrateur
rechercher dans ce fichier la ligne "nano.menu.cpu.atmega328.upload.speed=" et mettre la valeur 115200 si ce n'est pas le cas (il se peut que ce soit 57600).
sauvegarder
à partir de là il faut relancer l'IDE Arduino (si l'interface était déjà ouverte) et programmer la carte.

Connecteur XL3 3 contacts mâle NC3MAH Neutrik |  |
Connecteur XL3 3 contacts femelle NC3FAH1 Neutrik |  |
Réseau de résistances 10K x 4 : | 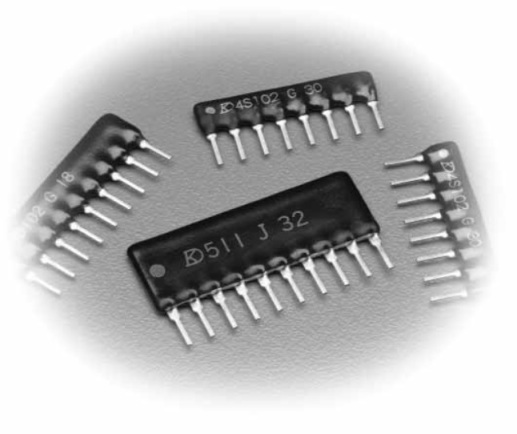 |
Jack alimentation : |  |
Transistor MGSF2N02ELT1G : Critères :
|  |
Complément : Dossiers des projets

|
|




